LIMITATIONS OF FIRST-GENERATION DIRECT DRIVE WHEEL BASES
Thrustmaster has been in the sim racing market for a long time now, and our objective has always remained the same:
Innovate quality products to share our passion with everyone .
Yes, this paper will mostly talk about quality products and how we make them, but we first want to briefly talk about you, because it fundamentally defines who we are, what we make, and why we’re writing this.
Thrustmaster is proud to be a big part of the sim racing environment. We gained the trust of hundreds of thousands of racers because we have long been committed to making sim racing products accessible to as many passionate people as possible. Why? Because we all share the same passion, unfortunately we do not all have the same resources to enjoy it. We chose this path because we want all sim racers to find a racing setup they’re happy with, whether they’re entering sim racing for the first time, or racing in the biggest competitions.
We’ve always made sure to overcome hurdles that could prevent someone from racing. No matter where they live in the world, how much money they have, what games they play on what platform, we want to offer everyone the best possible experience regardless of their resources.
Achieving this objective requires a big, devoted team: of course there are the engineers who design and build products that accurately capture the emotions of a race, our valuable licensing partners to convince of the technology and value proposition, our global sales team to convince resellers to include it in their lineup, logisticians who ship in the right components to the factory in the right quantities and then ship out finished product to warehouses around the world, and the marketing and customer support teams who help end-users understand the product in their local language.
This means that at our ambitious scale, there are many variables in the equation to make a great product available to everyone around the globe. We’re constantly evaluating all possible options, and making compromises to release the best quality product and make it available at the best possible prices.
Among dozens of other variables, choosing the right motor typology is a key, early part of this complex equation.
Over the years we learned to work with many various motor typologies because they all have their pros and cons. To put it simply, one solution has never been the best everywhere, and to craft industry-defining legends such as the T150 or T300, we needed to constantly explore and push new boundaries. At the end of the day, it’s a matter of aligning race feeling with material cost, heat management, material life span, quietness, durability, design, availability of components, etc.
So, how about direct drive motors? We have been testing and optimizing many Direct Drive solutions since 2017. However, the ambition was to launch an affordable solution that delivers high fidelity response to the games. For more than 20 years, we are hearing the complaint from game developers that their game’s effects deserve more fidelity as they render through wheels, and that some were unhappy with every motor on the market. We knew that even as the current generation technology was improving each year, there were still major limitations. The largest limitation was the one type of direct drive motor (First-Generation DD) that had become the sole reference in the high-end market.
However, it was clear early on that, unfortunately, this First-Generation Direct Drive technology could not be used for the more affordable solutions. Mostly requested by the console players, it appeared that reducing the production cost (meaning reducing motor force or part quality) had extreme impacts on the wheel fidelity, to a point where it never reached our standards.
At that point, we had two options: persist and release a console DD we did not believe represented us or the community, or stick to our original objective and continue crafting quality products by innovating the core technology that defines what an affordable DD motor could be.
How does a First-Generation Direct Drive wheel base work?
All current Direct Drive wheel bases roughly work the same, and to make sure everybody understands where we’re going with this paper, we would like to briefly explain how they work.
Basic principles
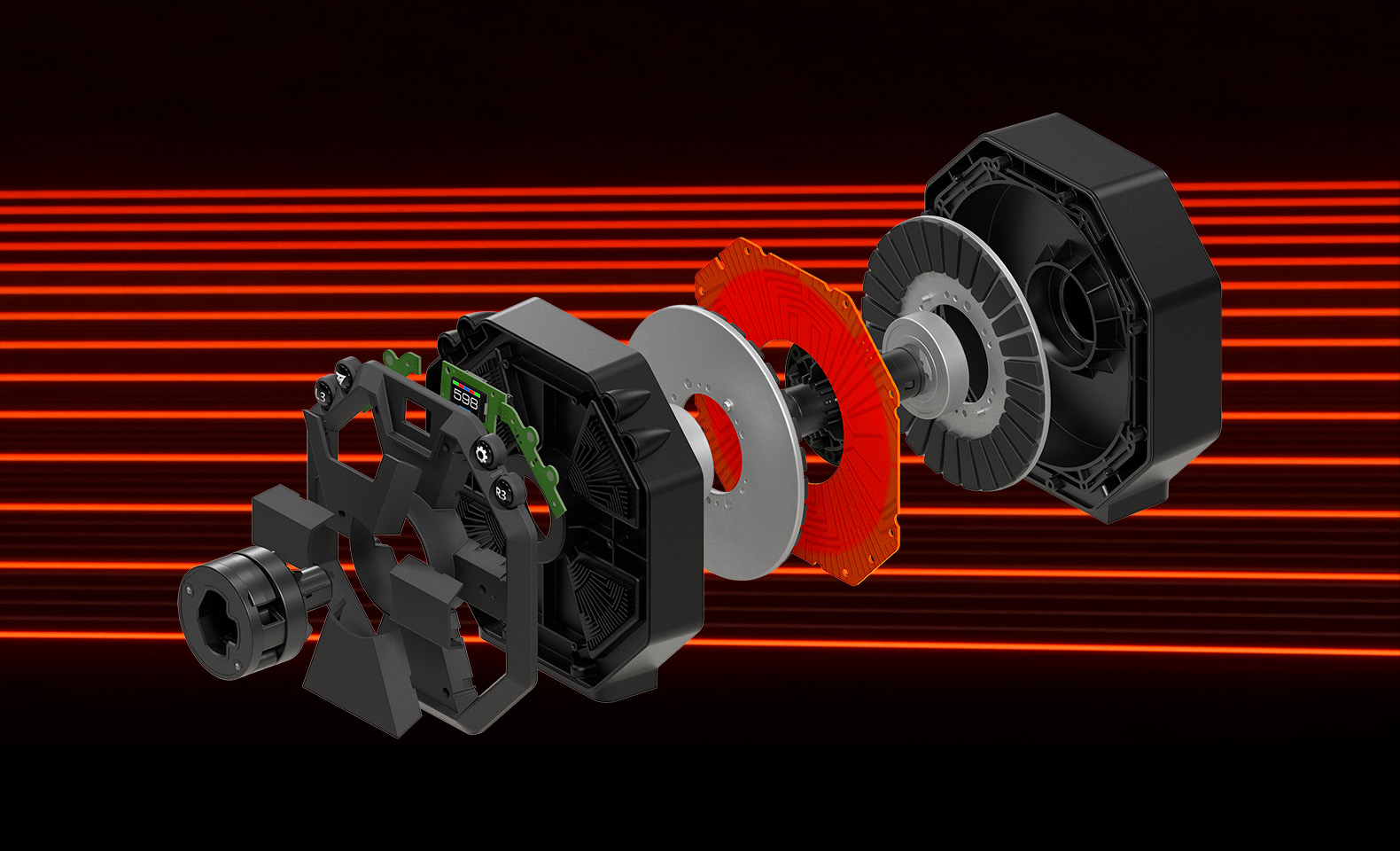
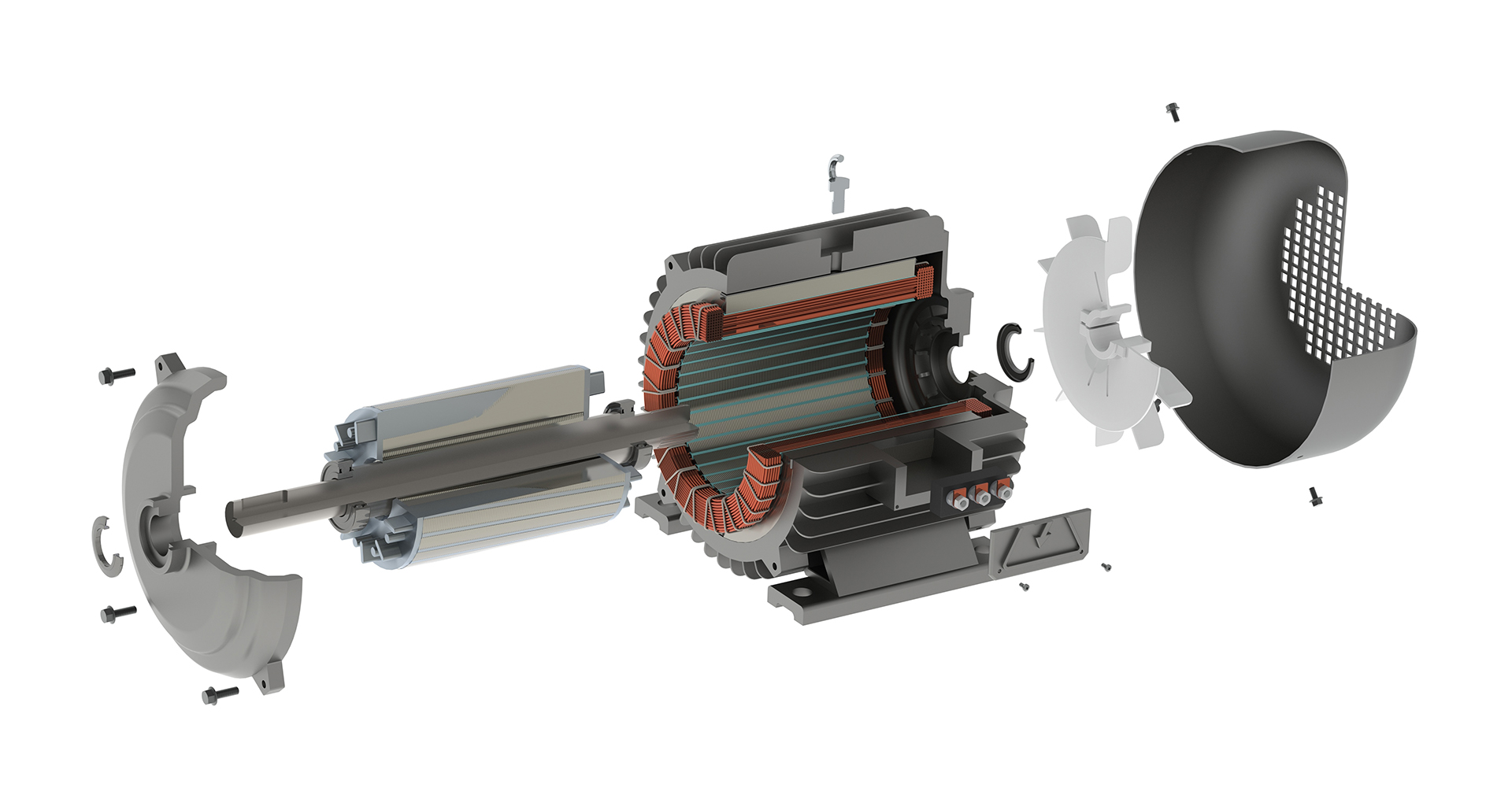
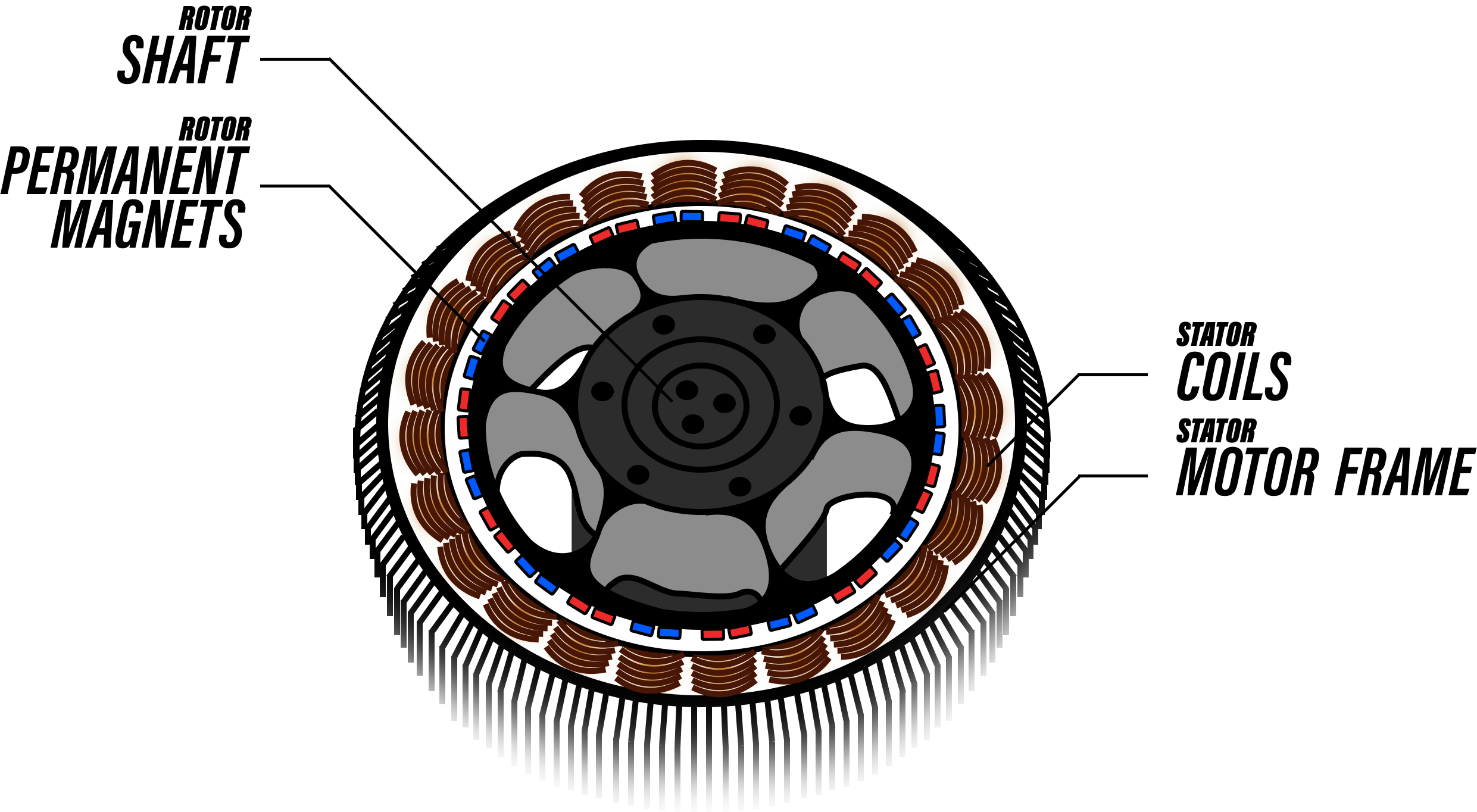
Inside the motor frame (the exterior shell of the wheel base), there is a static part in the shape of a tube, around which many coils are placed. A coil is a coated copper wire rolled tightly into a spiral, and it basically functions as a magnet that only works when electricity runs through it.
All of that is called the stator, and as the word etymology suggests, it is static and functions as an unmoving tube.
Down the center of this tube is a solid shaft that rotates. This part is technically called a rotor and is covered with many magnets (permanent magnets, to be accurate). In this motor typology, we directly connect a wheel to the shaft, hence the name direct drive.
Because there are no gears or belts connecting the wheel to the motor, this motor has very low latency and provides instantaneous feedback to the driver. And low latency is very important in sim racing, because a few milliseconds of delay at each turn can easily turn into a delay of few seconds when crossing the finish line.
The rotor is therefore the only part that moves in the motor. It does so by using a basic physics mechanism: magnetism. As electricity flows through the stator coils, they become magnetic and start reacting with the magnets on the rotor, making it move. This was theorized and proved about 200 years ago by Michael Faraday, which we better know today as Faraday’s Law of Induction.
By activating only specific coils, the magnets on the rotor will be attracted to these specific coils and repelled by others, making the shaft rotate until magnets are aligned and can’t get any closer and stop moving.
And this is — very basically — how the game communicates force feedback : the game says “the wheel should pull in this direction” and turns on the coils accordingly to make the shaft rotate until it reaches the desired angle. The user, by steering the wheel, fights against those in-game forces to master the art of sim racing.
This type of motor is called a “Low RPM” motor (RPM = Revolutions Per Minute), meaning it is not meant to spin fast continuously, but rather move very quickly in a short period of time and deliver enough force to counter the driver’s arms strength.
Technically the user is the one ‘turning the wheel’, no? The forces that are ‘in-motor’ are in-game feedbacks, and they are what the user pushes back against as they try and steer (‘turn the wheel’). I think we should be clearer about that.
Understanding performance measurement of the motor
You have probably heard that a motor’s power is expressed in Torque, and that “torque is measured in Newton-Meters (Nm)”. That is correct, but it’s very hard for most of us to visualize and comprehend what a Newton-Meter really is, and what it feels like in your hands.
Let’s try and cut through the mathematical equations and convert it into something we know, so we can put a feeling on it.
The Torque τ is the result of multiplying a Force F (expressed in Newtons) by the Radius r of the wheel (expressed in meters).
Torque τ = Force F x Radius r
τ = F × r
While it’s easy to visualize the radius of the wheel in Meters, it is very hard to grasp what a Force is. Force is a weight m (in kg) multiplied by an earth gravity constant a (this constant commonly defines the g’s your body receives when accelerating rapidly).
F = m × a
We know what a kilogram feels like, and what the earth gravity feels like, so we’re getting somewhere. Without getting into too many details on how the above formula works, we can make a huge shortcut and say:
1 Newton is the feeling of carrying 100 grams (or 0,1kg).
Now, back to our torque τ = F × r . We can also say that the force is equal to the torque divided by the distance.
τ / r = F
Let’s now suppose we’re using a constant 4Nm wheel base, with a 28cm wheel (which has a radius of 0.14m). The force of this motor is then
Since 1 Newton is like carrying 0,1kg, turning our wheel in the opposite direction at full power will feel like carrying 2,85 kg with both hands, or 1,42kg in each hand.
Constant Torque vs. Peak Torque
There are two ways of expressing the Torque of a motor: either by using its “Peak Torque”, or its “Constant Torque” (a.k.a “Continuous Torque”). In the First-Generation Direct Drive wheel bases, peak torque is usually between 20% and 50% higher than the constant torque. But what do these terms actually mean?
Peak torque and constant torque are radically different, yet often misunderstood and used interchangeably. For reasons we explain further in this paper, a motor does not output the same power all the time. Instead, it can deliver brief peaks before stabilizing to a constant torque value. In motors made for sim racing, the peaks in Torque usually only last few milliseconds.
Most people visualize the strength of the motor as the strength their own arms must deliver in a long corner, which could compare to how many g’s you would take in a corner in a real car. This vision of motor power is close to the definition of constant torque. The constant torque is the power the motor can maintain in the long run, after hours of racing.
Equally important is the peak torque, which will give you all the extra details you need to take corners at high speed. In sim racing you heavily rely on the wheel to provide you with all the information to react quickly to avoid understeering and oversteering, to feel your tire wear and anticipate what adherence you’ll have based on what information the wheel provides. All of that is provided by the peaks; the more powerful they are the more the motor goes beyond its constant torque and provides detailed information about your car’s situation. Think about it as a strong vibration you can feel, not as strength you must physically provide.
We often read that playing with a high torque is like going to the gym, so let’s complete the metaphor and clarify it:
- Constant torque would be how much weight you can lift.
- Peak torque would be how hard you can punch a training bag.
So while Constant and Peak torque are not synonymous, they are correlated because you need one single motor that is good at both in sim racing. Creating the motor that can do both is a key to providing an accurate driving feeling.
Communication with the platforms: games, PC/Console, software and hardware
One key aspect of a wheel base to have in mind, no matter its motor technology, is that it relies on the quality of information it receives. When you’re driving in the simulation, the force feedback information passes through several gates before being translated by the wheel base into a tangible force you can feel.
When racing, the game is making hundreds of decisions per minute about different forces that need to be applied to the wheel. It will look all the information it has (wheel position, grip, tire temperature, suspension etc..) and decide whether or not your wheel is correctly angled, or if it should be somewhere else.
Depending on the platform you play on, there may be an intermediate hardware that allows communication between the wheel base and the game. For example, all console manufacturers require the peripherals to have a specific, official chip. This ensures that the licensed peripherals meet the quality and safety requirements of the console manufacturer. All platforms are very different, and they do not all enable the same features in the wheel (such as some telemetry information for example).
Then, the information is sent to the firmware (a software directly inside the wheel base) that will be responsible for converting the game data into physical movements. Hardware manufacturers actively work with the game developers to integrate their wheels seamlessly into the games because the better the wheel is integrated, the better the sensations are, the less settings players need to tweak in an external software, and the more “plug-and-play” the wheel base becomes.
One misconception is that a game sends the same raw feed to all wheel bases, which each wheel then interprets in its own way. In reality, each manfacturer’s SDK (Software Development Kit) is manually set up by the game developer, and the manufacturer helps the developers get the best feeling and performance.
You may wonder where the PC software of a wheel base stands in this journey. Well, in most cases, the software does not do anything during the race. When changing your wheel base settings in the software, you simply give instructions to your wheel base to read the inputs differently.
The problems associated with First-Generation Direct Drive
OK, so you have a better understanding of sim racing hardware technology and how it translates game data into force feedback. And many sim racers probably think that most DD wheels on the market do the job pretty well. But that opinion is formulated in an industry with a single, basic technology. A technology that has its faults, especially when we consider the balance between cost and tech specs.
Electric motors all have exactly the same job: transforming electrical power into mechanical power. The better it can transform electrical power (input) into mechanical movement (output), the more efficient and accurate that motor will be. Anything that interrupts a motor’s transformation of electrical input into mechanical output is a loss. Let’s sum up a motor efficiency like this
Mechanical power = Electrical power – Losses
There are three commonly understood losses that all reduce the efficient performance of a motor:
- Friction losses: if a moving part touches another part, then it causes friction which impacts the torque output, and generates heat that will deteriorate the materials over time.
- Copper losses (the Joule Effect): when inducting an electrical current through a coil, the copper “resists” and generates heat as a result, lowering the performance of the motor exponentially.
- Iron losses: moving two magnets relative to each other creates changes in their magnetic flux, which tends to reduce the speed at which you can move these magnets.
So let’s expand our definition of Losses in our formula of motor efficiency this way:
Mechanical power = Electrical power – (Friction losses + Copper losses + Iron losses)
In the case of the First-Generation Direct Drive wheel base, Friction Losses are very low, which is what makes it a great advantage over gear and belt technology. This also reduces the noise of the base when playing and removes undesired effects in the wheel you could interpret as road effects or tires adherence. The two other types of losses are, however, a lot more complicated to manage, due to heat, cogging and saturation.
Copper losses: managing heat is expensive
Carefully managing heat is important for any motor typology: the warmer it gets, the less efficient it becomes and the more it deteriorates (the parts start to soften or can even melt/burn).
First-Generation Direct Drive wheel bases motors are called “radial” flux motors, and they require a lot of copper to work. The copper coils cover the entire length of the motor, so by design, the power that this Direct Drive motor typology can deliver is directly defined by how much electromagnetism there is between the rotor and the stator. The more intense the magnetic field, the greater strength attracting them, which means the greater force you need to apply to the wheel to separate them.
To offer users a more powerful torque using this technology, we are limited to three options:
- Increase the electrical current that runs through the motor. This for example can be achieved by changing the power supply for a more powerful one.
- Add more magnetic material (coils and permanent magnets), but that takes up space and requires more material which is not only costly, but also requires more electrical power.
- Improve the purity of the materials to increase their efficiency, but better materials are more expensive.
While increasing the electrical current seems like the easiest and most cost-efficient solution, doing so will increase the copper loss exponentially as it generates more heat due to Joule Effect.
Copper losses = Resistance of the material x Intensity of the electrical power (squared)
Increasing the electrical current can only be done up to a certain point. In most countries, a consumer product cannot exceed 60 °C (140°F) when touching its surface with the hand. Because the heat increases exponentially with the intensity of the current, the efficiency of this solution is capped for safety and degradation reasons.
As we increase electrical input, we also must ensure that we are reducing Copper losses, which is done in two ways:
- reduce the resistance of the materials used.
- cool the materials faster by dissipating the heat out of the motor.
To make it simple, reducing the resistance is an expensive option. We either must use purer material with lower natural resistance or increase the size of the material to let more current flow. In both cases the price of the product goes up rapidly. When targeting high-end customers for whom budget is less of a constraint, this solution is perfectly viable, but is hardly suitable for the majority of customers who cannot afford such a solution.
The common alternative is to maximize the cooling of the coils. The preferred solution is “passive cooling”, meaning the system cools down by itself thanks to its structure. This is usually achieved by using radiators on the outside of the motor to dissipate heat. If passive cooling solutions are insufficient on their own, the motor then needs an active solution such as fans or water-cooling which adds to the final price.
In the case of First-Generation Direct Drive wheel bases, one active cooling solution that is widely implemented is to use algorithms that reduce the output torque when the motor can no longer cool down efficiently. This does not impact the product cost but can result in lower constant torque during longer sessions. In some cases, in racing circuits that feature long corners such as (for example the Nascar ovals or Turns 13 and 17 on the new Las Vegas Strip Circuit), maintaining a constant high torque for several seconds will progressively (and exponentially) increase the heat generated. All wheel bases that implement safety measures will then lower the electrical power to prevent the motor from overheating, and allow some time for the coils to cool down. This results in a feeling some have
experienced, where you start losing the finer force feedback details and power in the middle of a corner, leaving drivers with incomplete car/track information, affecting proper response time.
Saturation of the motor: clipping and Iron loss
First-generation Direct Drive motors can saturate] in different ways, with different symptoms. We typically differentiate two types of saturation in a wheel base.
In the first case, the saturation is commonly called “clipping” by drivers, and that usually happens when either the game can no longer calculate information properly and does not differentiate peak torque from constant torque, or the base reaches its maximum torque capacity and can no longer provide additional details. When the clipping is caused by unoptimized in-game settings, the software will usually display a warning to indicate that you should change the force feedback settings within the game menu. But when the clipping is caused by the hardware or other ‘outside the game’ settings, racers are only able to feel it by comparing it with the unfiltered state of the motor. The clipping may erase key information entirely, and the more clipping occurs, the harder it is to understand exactly where something is going wrong.
In the second case, the saturation is directly related to the design of the first-generation Direct Drive wheel bases. And this is where the Iron losses mentioned earlier appear. Magnetic saturation is quite a complex concept to grasp but understanding it helps you understand where we’re going with all of this, and maybe give you a hint of what’s coming in the Next-Generation Direct Drive wheel bases.
When moving two magnets relative to each other, their internal currents are modified which directly impacts their magnetic fields and the speed at which you can move them. Two phenomena generate these Iron Losses:
- Hysteresis : all materials (and their various purity) do not have the same tolerance when it comes to reversing their magnetic flux. This is quite important for a wheel base to have high frequency tolerance to flux reversal because we need the wheel base to react as fast as possible and vibrate a lot. Concretely for a driver, this means some materials will not allow perceptible movements and vibrations to give detailed feedback.
- Eddy currents : when the coils generate magnetic flux, they induce an internal current in the other materials perpendicular to them. In First-Generation Direct Drive motors, the permanent magnets are indeed perpendicular to the coils, which generate a whirlpool of electricity inside the magnet (known as an eddy current). We mentioned earlier that inducing an electrical current in a material generates heat due to Joule effect, and we already know the problems related to heat. Another issue is that this induced current creates its own magnetic field, which always repels the coils, generating losses in power and adds inaccuracy in the motor.
Defiant but Dirty: the cogging problem
Cogging is an undesired effect of the First-Generation Direct Drive typology, and there are two reasons why it happens. First, let’s have a look the motor design. You can see that the magnets (coils and rotor magnets) want to align with each other, and that alignment defines the rotation of the wheel thanks to the shaft
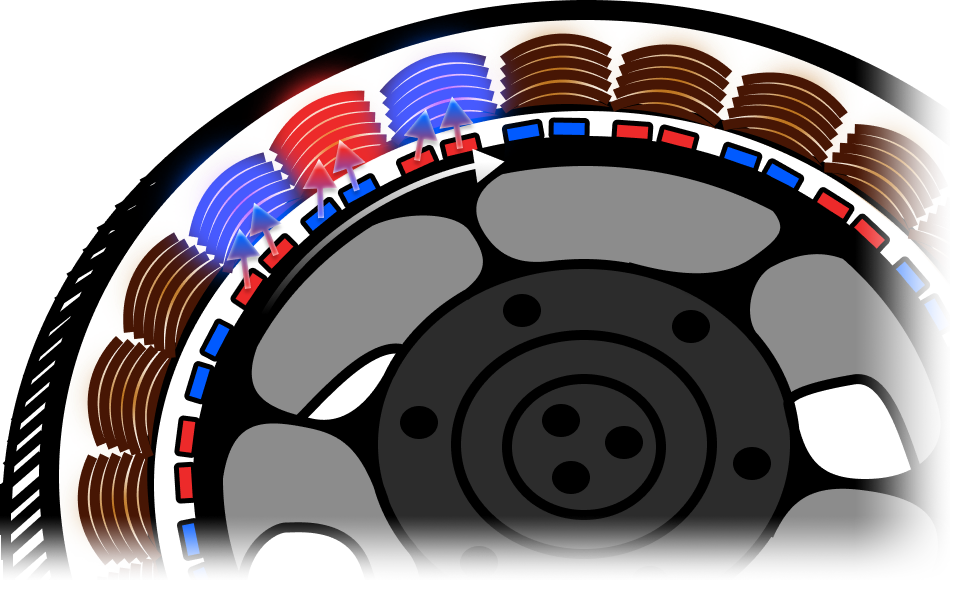
To change the rotation of the wheel, we must align the magnets with other coils. But what if the game needs the wheel to be angled so that it does not align exactly with the magnets? There is no in-between there, the base must decide if it should:
- Align magnets and coils, but provide a wrong input and add a “snap” feeling, like a rotary encoder.
- Reduce the magnetism in between two coils, but that causes a lot of “noise” in the motor and creates oscillations.
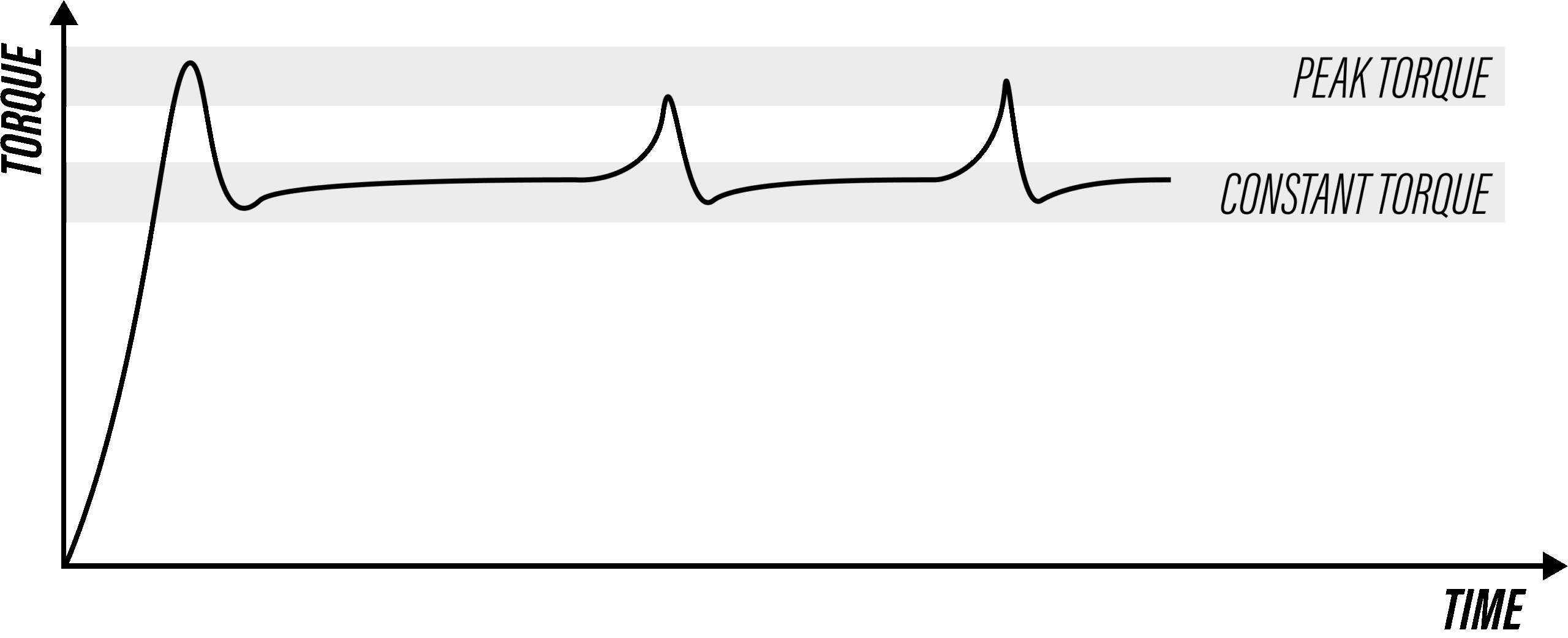
Here is an illustration of the expected torque versus the actual torque due to cogging.
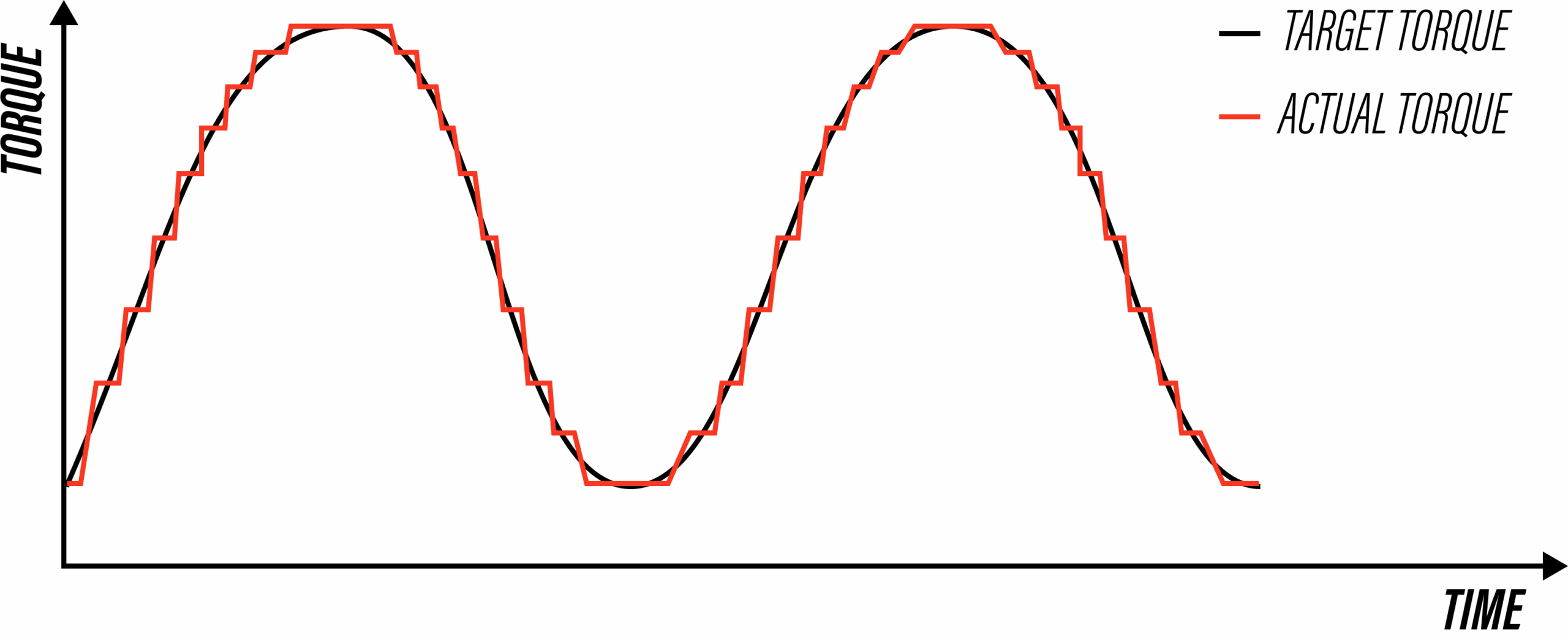
As you can see, the bumps in the actual torque curve are the results of cogging torque. The magnets “snap” with each other for a short period of time when passing in front of each other. You may have experienced it in a First-Generation Direct Drive wheelbase, when moving the wheel slowly.
Cogging torque effects apply to motors in a wide range of usage and is not specific to sim racing. For example, machines on production lines can experience misalignment of a robotic arm with this type of radial flux motor.
To compensate for the torque cogging, all First-Generation Direct Drive wheel bases use anti-cogging algorithms in the firmware, but it comes at the cost of modifying the output the game sent to the wheel to smooth out the movements. Basically, the algorithm knows it cannot complete the requested action; therefore, it makes a compromise between what is expected, and what it can deliver. This makes the output of the wheel noisy and dirty; the drivers miss crucial parts of the car information, and even worse, can misinterpret the wheel behavior because of undesired movements due to cogging.
It is important to note that cogging is more and more of a problem when you reduce the number of coils in a motor, which is required to make the base cheaper.
A New Era: Next-Generation, Affordable DD?
Now that we’ve explained why we could not use existing technology to create an affordable DD base that met our standards, we hope you understand why what’s coming will be well worth the wait. It was never about making a DD on console or not, it was about introducing a DD that balances affordability with precision, and pushes the boundaries for what forces can be communicated from the game into the hands of the racer; ultimately, an affordable console DD that you’ll enjoy playing with.
Some of you probably already figured out where all of this is going, but there is a lot to process, and we want to give everybody the time to understand the main concepts as there will be a lot to unpack as we breach the horizon of a New Era.